К теоретическому обоснованию возможности уменьшения ошибок измерения угловых координат цели оптико-электронного координатора, размещенного на качающейся платформе
Алексей ЖЕЛНИН,
подполковник, старший преподаватель кафедры № 9 (зенитных комплексов ближнего действия) Военной академии войсковой ПВО Вооруженных сил Российской Федерации имени Маршала Советского Союза А. М. Василевского, г. Смоленск
Владимир ЛЕБЕДЕВ,
кандидат военных наук, доцент, старший преподаватель кафедры № 9 (зенитных комплексов ближнего действия) Военной академии войсковой ПВО Вооруженных сил Российской Федерации имени Маршала Советского Союза А. М. Василевского, г. Смоленск
В теории автоматических следящих систем известно множество различных способов повышения точности слежения системы. Между тем, сопровождение воздушной цели координатором при движении самохода приводит, наряду с ошибками, связанными с косвенным увеличением динамики перемещения цели, к ошибкам определения геометрического центра цели, и это проявляется в появлении флуктуационной составляющей ошибки сопровождения цели.
Для систем автоматического сопровождения, на вход которых поступает смесь полезного и мешающего воздействия, применение классических способов повышения точности сопровождения неприемлемо, так как при реализации подобных способов также повышается точность отработки мешающих воздействий. Синтез высокоточных комплексированных следящих систем (КСС) по методике Ф. Л. Савицкого позволяет создавать следящую систему с требуемым качеством сопровождения, но для ее применения необходимо линеаризовать характеристики нелинейных элементов.
В работах Г. Ф. Зайцева и В. К. Стеклова рассматриваются подходы и способы компенсации естественных нелинейностей в автоматических системах высокой точности. Их сущность заключается в том, что компенсация нелинейностей элементов обеспечивает линеаризацию системы и позволяет реализовать любой из способов повышения точности сопровождения цели.
Анализ этих подходов и способов позволил сделать вывод, что в зависимости от типа нелинейности ее компенсация может быть, как полной, так и частичной. Как правило, частичная компенсация связана с расширением линейного участка характеристики нелинейного элемента до требуемых пределов. Пределы линейного участка определяются максимальными по амплитуде значениями параметров сигнала на входе элемента, при котором нелинейные свойства системы не проявляются, в этом случае нелинейный элемент рассматривается как линейный.
Так как синтез КИ следящих систем заключается в формировании управляющего воздействия за счет введения корректирующих сигналов, при которых исполнительное устройство обеспечивает требуемую точность отработки задающего воздействия, то очевидно, что при высокой динамике изменения задающего воздействия у такой системы на вход исполнительного устройства (электродвигателя) подается воздействие, выходящее за пределы линейного участка его характеристики. Поэтому для решения поставленной задачи по созданию КИ к углам качки КСС допустимо применить частичную компенсацию нелинейности типа «ограничение», присущую электродвигателю.
Синтез КИ КСС осуществляется в предположении линейности всех элементов исходной системы.
Структурная схема типовой линеаризованной КИ КСС оптико-электронного координатора сопровождения цели представлена на рис. 1. Здесь: H(p) – операторный коэффициент передачи (ОКП) гироскопического датчика углов качки (курса); F(p) – ОКП фильтра, формирующего корректирующий сигнал; Wуд(p) – ОКП углового оптико-электронного дискриминатора; Wиу(p) – ОКП исполнительного устройства.
Комплексируемым измерительным устройством является гироскопический датчик с ОКП
![]()
где p = d/dt – математический оператор дифференцирования по времени;
k, Tк – коэффициент усиления и постоянная времени гироскопического датчика.
Точкой ввода корректирующего сигнала является вход исполнительного устройства (электродвигателя привода сопровождения цели) координатора.
Синтез КИ КСС с требуемым порядком астатизма, обеспечивающий необходимое качество сопровождения цели в условиях качек, сводится к синтезу фильтра, формирующего корректирующий сигнал. Комплексирование обеспечивает повышение точности отработки воздействий качек, и это эквивалентно стабилизации оптической оси координатора и отработке полезного воздействия (перемещения цели) в штатном режиме.

В общем случае динамика КИ КСС по отношению к мешающему воздействию описывается системой уравнений

Подстановкой первого уравнения системы во второе и выполнением над вторым соответствующих преобразований, можно получить ОКП следящей системы по ошибке
![]()
Представляя ОКП всех функциональных устройств КИ КСС в виде отношения полиномов (многочленов),
 и с учетом (3)
и с учетом (3)
Так как задача синтеза КИ КСС решается при заданных структурах и параметрах следящей системы и измерительного устройства (гироскопического датчика), то с учетом переобозначений полиномов, определяющих функциональные устройства системы с фиксированными параметрами,

выражение (4) принимает вид

Все составляющие числителя и знаменателя в (5) могут быть представлены в виде

где , , – части полиномов со степенью, большей n, а коэффициенты полиномов
![]()
Необходимым условием для повышения астатизма КИ КСС до n-го порядка (повышения точности следящей системы координатора) является равенство соответствующих коэффициентов полиномов и ,
 (6)
(6)
Так как система (6) имеет в левой и правой частях неизвестные коэффициенты полиномов и , то ее решение в явном виде отсутствует. Для получения оптимального решения системы (6), требуется задание конкретных значений коэффициентов одного из полиномов (либо , либо ), например, коэффициентов.
Подставляя в (6) , имеем
Искомые коэффициенты определяются решением системы (7) в векторно-матричном виде
Таким образом, показано, что реализация выражений (1)-(8) обеспечивает требуемый порядок астатизма КИ КСС по отношению к возмущающему воздействию качек самохода.
Исследование качества функционирования КИ КСС с требуемым порядком астатизма при воздействиях сигналов сопровождения цели и качек самохода осуществлялось с помощью имитационного моделирования. В качестве наиболее сложного задающего воздействия рассматривалось движение типовой для ЗПРК цели на малой дальности с максимальной скоростью на параметре. При этом к задающему воздействию добавлялось мешающее, связанное с качками при движении ЗСУ по трассе случайного профиля. Имитационное моделирование процесса сопровождения цели, синтезируемой КИ КСС осуществлялось с целью определения значений параметров состояния системы во времени и элементов системы, из-за которых проявляются ее нелинейные свойства.
Так как основным нелинейным элементом в системе является исполнительное устройство типа «электродвигатель», то оценивание значений амплитуды сигнала на входе двигателя позволяет определять ширину линейного участка динамической характеристики КИ КСС, обеспечивающую линеаризацию исполнительного устройства.
Для расширения линейного участка характеристики исполнительного устройства до требуемых значений использованы положения теории компенсации естественных нелинейностей автоматических систем из работ Г. Ф. Зайцева и
В. К. Стеклова, суть которых состоит в формировании и введении требуемых корректирующих сигналов на вход и выход нелинейного исполнительного устройства. Операторный коэффициент передачи электродвигателя
![]()
где – операторный коэффициент передачи его инерционной части;
![]()
– функция, описывающая его нелинейность, определяемую мощностными возможностями (рис. 2).
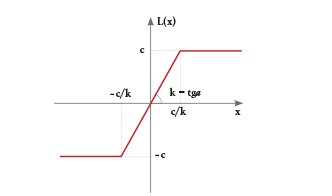
Рис. 2 Характеристика исполнительного устройства типа двигатель
Сигнал на выходе электродвигателя

где – операторный коэффициент передачи инерционной части
электродвигателя; – сигнал на входе электродвигателя.
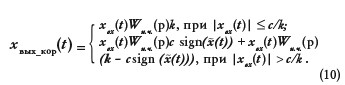
Анализ (9) позволяет сделать вывод, что для компенсации нелинейности типа «ограничение» на выход исполнительного устройства при воздействиях необходимо подавать корректирующий сигнал вида
![]()
а при воздействиях корректировку выходного сигнала осуществлять не нужно.
Сигнал на выходе исполнительного устройства при компенсации нелинейности типа «ограничение» имеет вид
Из (10) следует, что так как входным сигналом исполнительного устройства является электрический сигнал, а выходным – скорость вращения выходного вала исполнительного устройства (электродвигателя), то для расширения динамического диапазона КИ КСС возможно применение двух электродвигателей с суммированием угловых скоростей электродвигателя самой следящей системы и электродвигателя корректирующего канала, что, например, может быть реализовано путем размещения исполнительных устройств по принципу «колонка на колонке».
В свою очередь, из анализа (2), описывающего формирование корректирующего сигнала, следует, что применяемый для этих целей дополнительный двигатель должен обладать таким же инерционными свойствами, как и основной, но с нелинейной характеристикой, представленной на рис. 3

(11)
Такая нелинейная характеристика позволяет отрабатывать ту часть сигнала, которая выходит за пределы линейного участка самой следящей системы. Принцип компенсации нелинейности типа «ограничение», реализующий (11), показан на рис. 4.
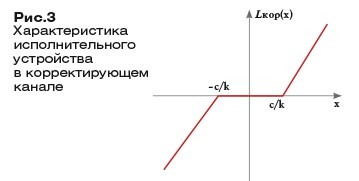

Рис. 4 Принцип компенсации нелинейности типа «ограничение»
Уменьшение ошибок достигается организацией оптимальной связи между специальными датчиками измерения углов качек и курса самохода и оптико-электронной системой сопровождения цели с компенсацией естественных нелинейностей КИ КСС координатора.