Это возможно сделать за счет установки на них современных радиоэлектронных средств
Алексей ЖЕЛНИН,
подполковник, старший преподаватель кафедры № 9 (зенитных комплексов ближнего действия) Военной академии войсковой ПВО Вооруженных сил Российской Федерации имени Маршала Советского Союза А. М. Василевского, г. Смоленск
Владимир ЛЕБЕДЕВ,
кандидат военных наук, доцент, старший преподаватель кафедры № 9 (зенитных комплексов ближнего действия) Военной академии войсковой ПВО Вооруженных сил Российской Федерации имени Маршала Советского Союза А. М. Василевского, г. Смоленск
Основными средствами подвижности зенитных комплексов войск ПВО СВ являются гусеничные машины, представляющие собой сложные технические системы. Они обладают высокими эксплуатационно-техническими характеристиками, но некоторые из них, такие как надежность, возможно повысить.
Согласно ГОСТ 27.002-89 под надежностью понимается свойство объекта сохранять во времени установленных пределов значения всех параметров, характеризующих способность выполнять требуемые функции в заданных режимах и условиях применения, технического обслуживания, хранения и транспортирования.
Основными единичными показателями надежности восстанавливаемых объектов, к которым относятся ГМ, являются:
параметр потока отказов;
наработка на отказ;
вероятность безотказной работы.
Для повышения единичных показателей надежности необходимо:
уменьшить количество отказов систем и агрегатов путем постоянного их мониторинга во время работы, своевременного технического обслуживания, постоянного контроля свойств горюче-смазочных материалов;
сократить время поиска отказавшего элемента системы.
Повысить надежность гусеничных машин представляется возможным за счет установки на них современных радиоэлектронных средств, объединенных в информационно-вычислительную систему.
По определению информационно-вычислительная система должна содержать ряд подсистем: измерительную, сбора, преобразования, предварительной обработки данных и подсистемы управления в целом. Информационно-вычислительные системы в настоящее время проектируют на основе агрегатного (модульного) принципа, по которому устройства, образующие систему, выполняются в виде отдельных, самостоятельных изделий (приборов, блоков). В составе информационно-вычислительных систем эти устройства выполняют определенные операции и взаимодействуют друг с другом, передавая информационные и управляющие сигналы через систему сопряжения или интерфейс.
Информационно-вычислительная система на гусеничной машине предназначается для решения задач постоянного измерения параметров систем машины, сохранения их в памяти, осуществления автоматической проверки работоспособности, оперативного вмешательства при угрозе поломки путем предупреждения, а затем и остановки двигателя.
Основой информационно-вычислительной системы является бортовой компьютер, обеспечивающий вывод данных на дисплей и при необходимости на внешние устройства. Все необходимые данные для обработки должны приходить с электронных цифровых датчиков по защищенному интерфейсу.
Работа информационно-вычислительной системы должна осуществляться под управлением пакета программ специального математического обеспечения, способных обеспечить:
сбор, сохранение и отображение информации о техническом состоянии важнейших для гусеничной машины систем;
проведение диагностирования систем с выдачей рекомендаций как на дисплей, так и на внешние устройства;
оперативное вмешательство в работу систем для избегания поломок и аварий с предварительным предупреждением механика-водителя, сохранением данных в памяти для отчета.
Работа в данном направлении ведется. Так, в Военной академии войсковой ПВО Вооруженных сил Российской Федерации имени Маршала Советского Союза А. М. Василевского разработано «Устройство для определения ресурса образца вооружения и военной техники по запасу топлива», на которое получен Патент на полезную модель.
Данное устройство позволяет решить задачу определения возможности выполнения задачи имеющимся запасом топлива к определенному моменту времени, ресурса образца ВВТ по топливу, остатка топлива к определенному моменту времени и ресурса образца ВВТ по оставшемуся после выполнения задачи запасу топлива. Устройство может быть интегрировано в предлагаемую информационно-вычислительную систему.
На всех зенитных комплексах имеются собственные ЭВМ, а у некоторых – два комплекта, но использовать их ресурсы в настоящей момент времени не представляется возможным прежде всего из-за того, что они работают от питания 220 В 400 Гц, вырабатываемых системой электропитания, которая запускается перед боевой работой. Бортовая сеть всех гусеничных машин питается от аккумуляторных батарей или стартер-генератора с постоянным напряжением 24 В.
В настоящий момент времени отечественная промышленность освоила и выпускает довольно большое количество бортовых компьютеров для автомобилей, работающих от напряжения 12 В, имеющих высокий уровень пыле- и влагозащиты IP66 по стандарту IEC-952, надежные металлические корпуса, систему ударозащиты, а также пассивное охлаждение. Они вибро- и помехоустойчивы. Поэтому они могут работать в самых разных условиях – как при низких, так и при высоких температурах, значительном скоплении пыли, повышенном уровне влажности, существенных вибрационных нагрузках.
Для работы современных бортовых компьютеров даже при высокой эксплуатационной нагрузке достаточно мощности 16 Вт. На всех гусеничных машинах установлено по четыре аккумуляторных батареи емкостью по 85 А/ч каждая. Благодаря параллельному соединению суммарная емкость сети составляет 340 А/ч, поэтому даже при неработающем двигателе бортовая сеть способна обеспечить питанием бортовой компьютер. При запущенном двигателе бортовая сеть дополнительно напитывается от стартер-генератора мощностью 10 кВт. Кроме того, при работе двигателя есть возможность подключить резервный генератор мощностью 40 кВт. Все это свидетельствует о том, что необходимой энергии питания БК на ГМ достаточно.
Каждая задача компьютера, которая выполняется, использует ресурсы процессора, памяти и видеокарты. Чем быстрее процессор, тем быстрее задача будет выполнена. Для автомобиля процессор должен быть в состоянии выполнять все операции по обработке задач. Некоторые задачи, такие как воспроизведение и запись, требуют много ресурсов процессора, тогда как другие задачи – нет.
Наиболее распространенные платы, используемые в автомобильных установках, имеют частоту процессора от 1,6-1,8 МГц (двухъядерный), и они являются достаточными для большинства задач автомобиля, таких как:
индикация времени;
оценка состояния стартерных аккумуляторных батарей;
отчет времени поездки;
определение средней скорости движения;
расчет оставшегося объема топлива и расстояния до заправки;
выдача на экран нескольких вариантов значимой информации, в том числе с дублированием ее голосовым сообщением.
Но более современные бортовые компьютеры обладают еще большим быстродействием и оперативной памятью (3-х дюймовые винчестеры (на 40-60 Гб), планки оперативной памяти (512 Мб) и процессоры семейств Celeron M или Pentium M). Они могут обеспечить решения следующих задач:
выход в Интернет;
связь с системами навигации и отображение своего местонахождения на цифровой карте местности;
голосовое сопровождение и т. д.
На рынке представлено большое количество бортовых компьютеров, оснащенных системами диагностики автомобиля.
Работают такие автокомпьютеры следующим образом: бортовой компьютер подключается к блоку управления электропитанием, который считывает информацию с датчиков автомобиля. Если какой-либо датчик передает сигнал о неполадке, то бортовой компьютер принимает его и расшифровывает в понятные человеку сообщения, которые выводятся на дисплей компьютера в виде: «проверьте уровень масла» или «неисправность системы питания», в том числе и голосовым сообщением.
Для одновременного отображения 10-15 значений параметров вполне достаточно небольшого (до 2-х дюймов) по диагонали монохромного дисплея с разрешением 128х64 или 128х32 пикселей. Но на большинстве современных автомобилей применяются жидкокристаллические дисплеи с диагональю 7 или 9 дюймов. На ЖК дисплей возможно вызывать карту местности, изображение с видеокамер.
Для контроля над состоянием систем и агрегатов на различных гусеничных машинах в настоящее время установлено порядка 13-15 аналоговых датчиков, данные с которых приходят по экранированным проводам на указатели, которые расположены на щитке двигателя перед механиком-водителем и на щитке бортовой сети. Кроме того, часть информации снимается с контакторов, при замыкании которых загораются сигнальные лампочки, расположенные на этих щитках. Точность измерения имеющихся датчиков низка.
Необходимо все эти аналоговые датчики заменить на цифровые, при этом места их установки можно оставить без изменения или установить аналого-цифровые преобразователи. Цифровая обработка сигналов в датчике реализуется встроенной электроникой, содержащей аналого-цифровой преобразователь, процессорное ядро, энергонезависимую память, цифровой интерфейс и прочие элементы (стабилизаторы питания, согласующие усилители и т. д.).
Но вместе с тем для более полной диагностики систем гусеничной машины необходимо установить дополнительные датчики, такие как: датчик замера количества и качества (вязкости) топлива, протекающего через трубопровод, датчик давления впрыска топлива в цилиндры двигателя, датчики качества масел и охлаждающей жидкости, датчик засоренности масляных и топливных фильтров, датчик работы вытяжного вентилятора отсека аккумуляторных батарей, датчик своевременности впрыска топлива в цилиндры двигателя. Таким образом, количество датчиков может возрасти до 25-30 штук.
Многие из необходимых датчиков уже разработаны, производятся российской промышленностью и имеются в свободной продаже. Цифровые датчики измеряют различные физические величины, и снимаемые с них сигналы имеют различную мощность, поэтому для устойчивой работы системы необходим надежный интерфейс.
Интерфейсная система реализует алгоритмы взаимодействия функциональных модулей в соответствии с установленными нормами и правилами. Наиболее подходящим для использования в гусеничных машинах представляется USB интерфейс. Universal Serial Bus – Универсальная последовательная шина. К одному каналу USB можно цепочкой подключить до 127 внешних устройств.
На современных материнских платах обычно имеется по два канала USB на контроллер. Обмен данными по шине USB проходит в пакетном режиме при максимальной пропускной способности до 12 Мбит/с, в версии 2.0 скорость увеличена до 300 Мбит/с. Этот приборный интерфейс обеспечит: число приборов до 50, максимально допустимую длину кабеля связи – 20 м, максимальную скорость передачи по магистрали – 1 Мбит/с.
Логические уровни сигналов выбраны из расчета применения интегральных схем ТТЛ (высокий уровень – не менее 2,4 В, низкий – не более 0,8 В). Нагрузкой каждой сигнальной линии является внутреннее сопротивление каждого прибора не более 3 кОм, подключенное к шине + 5 В, и резистор 6,2 кОм, подключенный к шине «земля» схемы. Кодирование информации, как следует из конструкции магистрали, ведется по байтам. В качестве шины вполне подойдет существующий экранированный кабель ГМ, но с условием увеличения проводов, для подключения новых датчиков.
Работать информационно-вычислительная система должна следующим образом.
На дисплее при проведении КО должна отразиться полная информация о состоянии всех систем (количество топлива, охлаждающих жидкостей, масел, напряжении в бортовой сети, работы вентиляторов, привода жалюзи и т. д.), далее информация должна гаснуть, а появляться должна рекомендация бортового компьютера о возможном способе запуска двигателя (воздухом, стартер-генератором или комбинированным способом) или рекомендация о необходимости предварительного разогрева двигателя предпусковым подогревателем.
После запуска двигателя должна появляться информация о давлении масла в силовой установке, гидравлической трансмиссии и информация о количестве оборотов двигателя, давление впрыска топлива из форсунок, температура масел и ОЖ, наличие зарядного тока генератора.
После необходимого прогрева двигателя бортовой компьютер должен оповестить механика-водителя о возможности начинать движение и о положении стояночного тормоза (включен или выключен) и оставить видимую информацию об оборотах двигателя.
При движении машины бортовой компьютер должен показывать скорость движения, обороты двигателя, номер передачи и расход топлива. При выходе параметров силовой установки, трансмиссии или ходовой части из допустимых пределов, бортовой компьютер должен выдать механику-водителю рекомендации по устранению неисправности. При подходе параметров к критическому уровню, бортовой компьютер должен предупредить об отключении двигателя и при отсутствии реакции со стороны механика-водителя – заглушить двигатель при помощи имеющегося во всех гусеничных машинах механизма остановки двигателя.
Для улучшения видимости с места управления машиной целесообразно установить камеры наблюдения как заднего, так и боковых видов, а изображение от них – проецировать на экран перед механиком-водителем и начальником расчета. Кроме того, на гусеничных машинах рекомендуется установить парковочный радар (парктроник).
Он измеряет расстояние до объекта с помощью ультразвука. Датчики парковки посылают ультразвуковые волны, которые, отразившись от препятствия, улавливаются сенсорами.
Парктроник выводит информацию на дисплей и дублирует ее прерывистым звуковым сигналом. Камера заднего вида может работать постоянно, а парктроник должен включаться при включении передачи заднего хода.
В таблице № 1 проведен сравнительный анализ возможностей и характеристик в ГМ до и после предлагаемой модернизации.
Таким образом, можно сделать следующие выводы:
установку информационно-вычислительных систем на гусеничные машины возможно провести в короткие сроки, так как подобные системы применяются на современных автомобилях в виде бортовых компьютеров и парктроников. Для этого необходимо провести испытания для выявления наиболее подходящего варианта оборудования и доработать программное обеспечение.
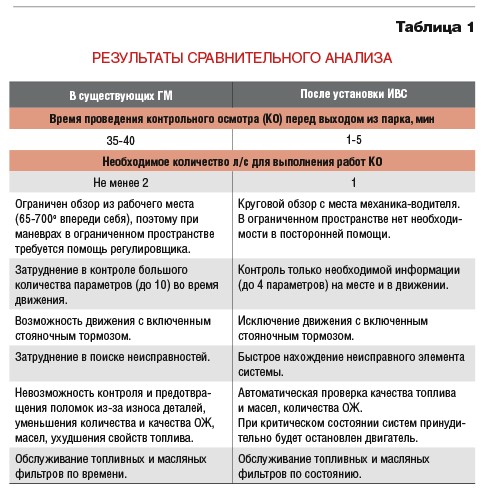 Таблица № 1 Результаты сравнительного анализа
Таблица № 1 Результаты сравнительного анализа
Информационно-вычислительные системы позволят значительно сократить время контрольного осмотра, улучшить надежность, уменьшить расход ГСМ и других технических жидкостей, повысить ремонтопригодность и перейти на техническое обслуживание по состоянию.
При подключении информационно-вычислительных систем машин в единую сеть (средства связи на гусеничных машинах установлены) появится возможность дистанционного контроля параметров старшими начальниками или более опытными специалистами, а это позволит оперативно влиять на их эксплуатацию.
Повышение эксплуатационно-технических характеристик гусеничных машин значительно повысит эффективность боевого применения зенитных комплексов и сделает их более конкурентоспособными на рынке вооружения.